Become a leader in the IoT community!
Join our community of embedded and IoT practitioners to contribute experience, learn new skills and collaborate with other developers with complementary skillsets.


Join our community of embedded and IoT practitioners to contribute experience, learn new skills and collaborate with other developers with complementary skillsets.



Hello guys,
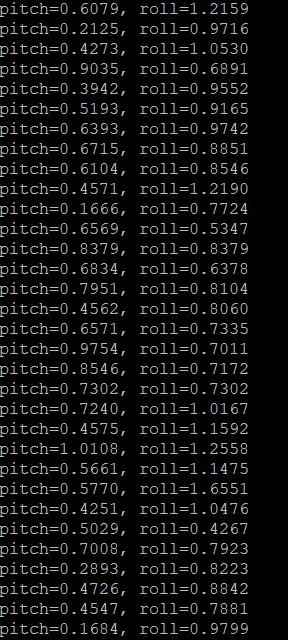
I’m working on a flight controller using an mpu6050 and I’m wondering if the pitch and roll fluctuate too much. These values represent the output of a complementary filter where I used a 0.98 weight for the gyro estimate and 0.02 weight for acc measurement. I didn’t calibrate the acc yet so I know there will be an offset, but what bothers me is the fluctuation. After a little research I stumbled upon some ideas of filtering the accelerations using moving average filter. Isn’t this a bit overkill? Or is it necessary? Then I was simply thinking to implement a Kalman F instead. I’m not sure if I should follow the Kalman or stick with the current implementation. What do you think? Thanks in advance.



CONTRIBUTE TO THIS THREAD