Become a leader in the IoT community!
Join our community of embedded and IoT practitioners to contribute experience, learn new skills and collaborate with other developers with complementary skillsets.


Join our community of embedded and IoT practitioners to contribute experience, learn new skills and collaborate with other developers with complementary skillsets.


I was previously working on a *distributed robotic control system* where multiple robotic arms communicate via *CAN Bus* to coordinate their movements. Each arm operates independently, but they share data […]
Hey guys, I previously worked on an automated irrigation system where different sensors (moisture, temperature) spread across large farmland communicate with a central controller over the CAN Bus. Each sensor […]
Hii guys I’m creating lighting variations on PORTA with a MEGA 2560 board. I am using a zero-cross detection that triggers an interrupt, which calls the “void passage_a_0” function. A […]
Hii guys 😌😌 I’m creating lighting variations on PORTA with a MEGA 2560 board. I am using a zero-cross detection that triggers an interrupt, which calls the “void passage_a_0” function. […]
Hi, I’m trying to get the value of my battery using an analog input of my ATTiny85 to create a gauge. To do this, I made a voltage divider to […]
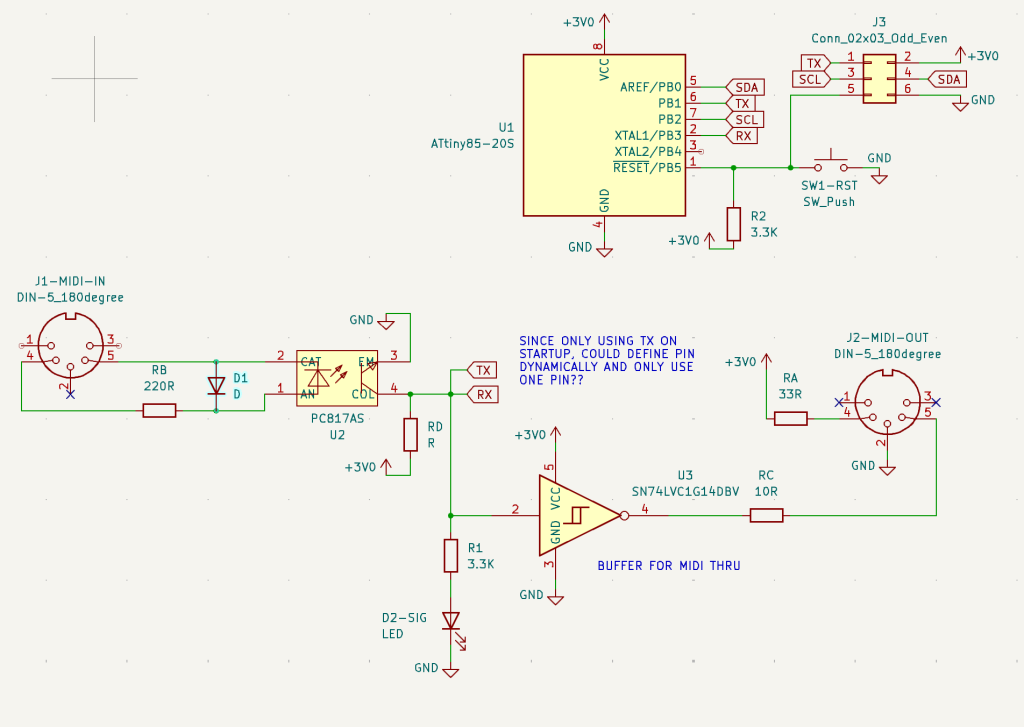
Related question: I’ll likely use an ATtiny85 for this project, meaning limited IO pins (WIP schematic pictured). I’ll mostly be listening for signals with a software serial Rx pin, but […]
I am using AVR128DA48 microcontroller to control an LED in serial communication. The way I set it up is not complex; I’m sending *‘ON’* and *‘OFF’* commands from a `python` […]
Hey guys, I’m using an AVR microcontroller with Zephyr to read data from an ADC via SPI. I’ve configured the SPI peripheral and device tree, but the data coming back […]
I’m trying to implement message prioritization on the CAN Bus for my Smart Industrial Monitoring System. High-priority messages (emergency alerts) should be transmitted before regular sensor data. I’m using the […]