Become a leader in the IoT community!
Join our community of embedded and IoT practitioners to contribute experience, learn new skills and collaborate with other developers with complementary skillsets.


Join our community of embedded and IoT practitioners to contribute experience, learn new skills and collaborate with other developers with complementary skillsets.



Hello everyone,
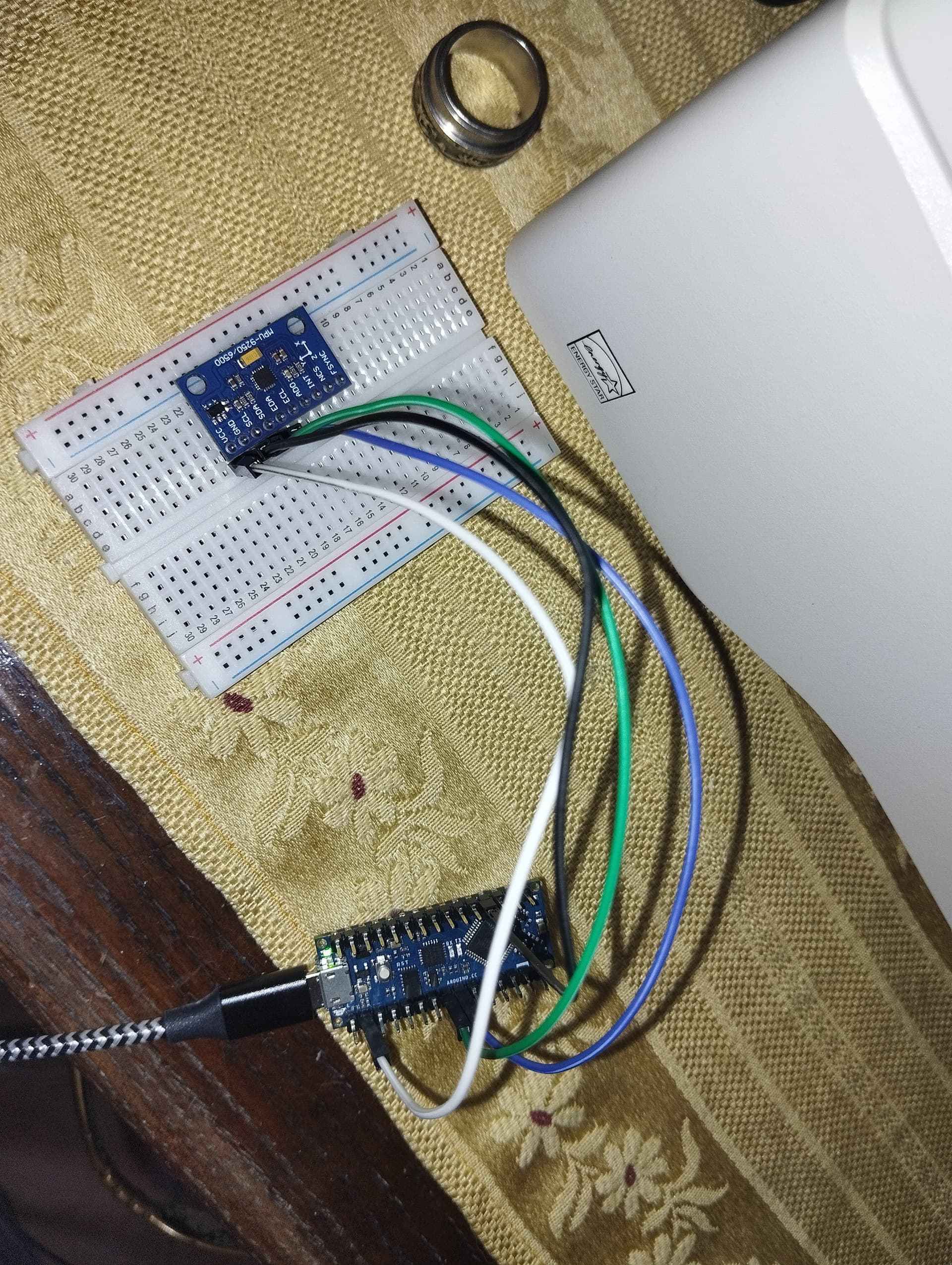
I was just wondering why this piece of code is not working.
The code get uploaded normally to arduino
But when I move the gyroscope it just give me random values of X & Y & Z
Im expecting 0,0, variable…
I checked the connection and it was correct
I thought either the sensor is broken or the code is wrong,
I’m using it to measure the acceleration of a moving object
Any ideas??
`
#include "MPU9250.h"
MPU9250 mpu;
void setup() {
Serial.begin(115200);
Wire.begin();
delay(2000);
if (!mpu.setup(0x68)) {
while (1) {
Serial.println("MPU connection failed. Please check your connection with connection_check example.");
delay(5000);
}
}
Serial.println("Accel Gyro calibration will start in 5sec.");
Serial.println("Please leave the device still on the flat plane.");
mpu.verbose(true);
delay(5000);
mpu.calibrateAccelGyro();
Serial.println("Mag calibration will start in 5sec.");
Serial.println("Please Wave device in a figure eight until done.");
delay(5000);
mpu.calibrateMag();
print_calibration();
mpu.verbose(false);
}
void loop() {
}
void print_calibration() {
Serial.println("< calibration parameters >");
Serial.println("accel bias [g]: ");
Serial.print(mpu.getAccBiasX() * 1000.f / (float)MPU9250::CALIB_ACCEL_SENSITIVITY);
Serial.print(", ");
Serial.print(mpu.getAccBiasY() * 1000.f / (float)MPU9250::CALIB_ACCEL_SENSITIVITY);
Serial.print(", ");
Serial.print(mpu.getAccBiasZ() * 1000.f / (float)MPU9250::CALIB_ACCEL_SENSITIVITY);
Serial.println();
Serial.println("gyro bias [deg/s]: ");
Serial.print(mpu.getGyroBiasX() / (float)MPU9250::CALIB_GYRO_SENSITIVITY);
Serial.print(", ");
Serial.print(mpu.getGyroBiasY() / (float)MPU9250::CALIB_GYRO_SENSITIVITY);
Serial.print(", ");
Serial.print(mpu.getGyroBiasZ() / (float)MPU9250::CALIB_GYRO_SENSITIVITY);
}`



@mr.aymen_ammari
^^
I didn’t notice it.
you call it on your setup function
I will try this one as it is
yep
Could you tag me next time, I didn’t see the message 😅
yes sure sorry
Thank you so much @medic4950
no problem
CONTRIBUTE TO THIS THREAD